
Da es nicht mehr all zu viele Maschinen von CTM (Computer Technik Müller, Konstanz) gibt, die überlebt haben, habe ich mich entschlossen, meine CTM 70 zum VCFe 19.0 nach Garching bei München mitzunehmen.
Auch wenn sie keinen Mucks mehr macht, ist sie doch ein sehenswerter Computer aus den späten Siebzigern. Das Design stammte von Hartmut Esslinger und wurde sogar durch einen Industriedesignpreis ausgezeichnet.

Beim Einschalten zeichnet der Monitor nur noch ein schwaches Bild mit Streifen auf die Röhre

Einziges Lebenszeichen
Das Besondere an Veranstaltungen wie dem Vintage Computer Festival ist, dass hier Cracks wie Nick nicht nur ihren Logic-Analyzer ausstellen, sondern auch damit umzugehen wissen.

Analyse beim VCFe
Step by Step messen wir zuerst an den PROMs, die den Nucleus (BIOS) enthalten und sehen, dass die CPU anläuft und auf die PROMs zugreift.
Die CPU ist übrigens keine CPU im üblichen Sinne, sondern besteht aus 4 ALUs vom Typ 74LS181
Like many historically important commercial computers, many home-brew CPUs use some version of the 74181, the first complete ALU on a single chip.[8]
The 74181 is a 4-bit wide ALU can perform all the traditional add / subtract / decrement operations with or without carry, as well as AND / NAND, OR / NOR, XOR, and shift.
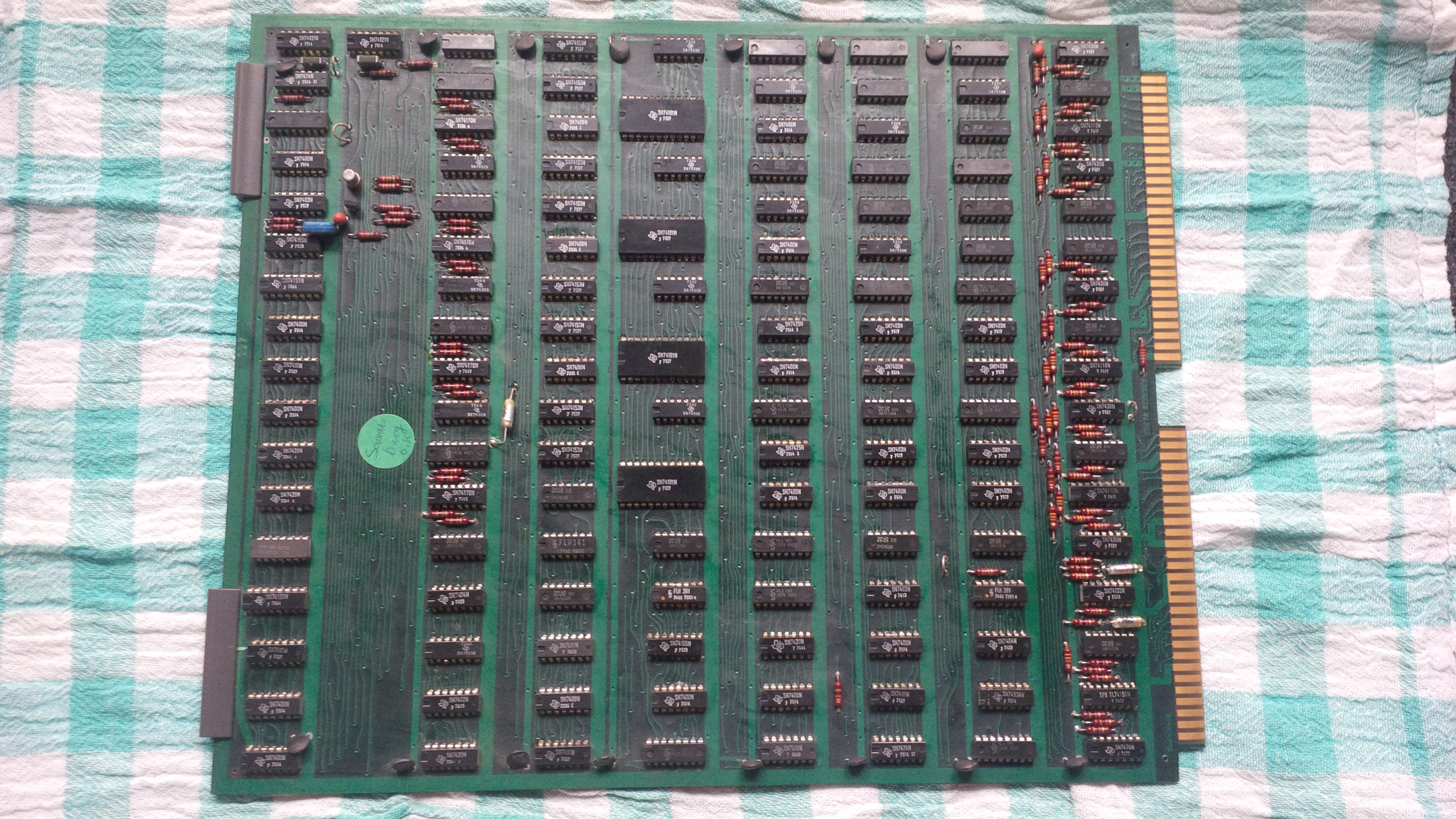
CPU
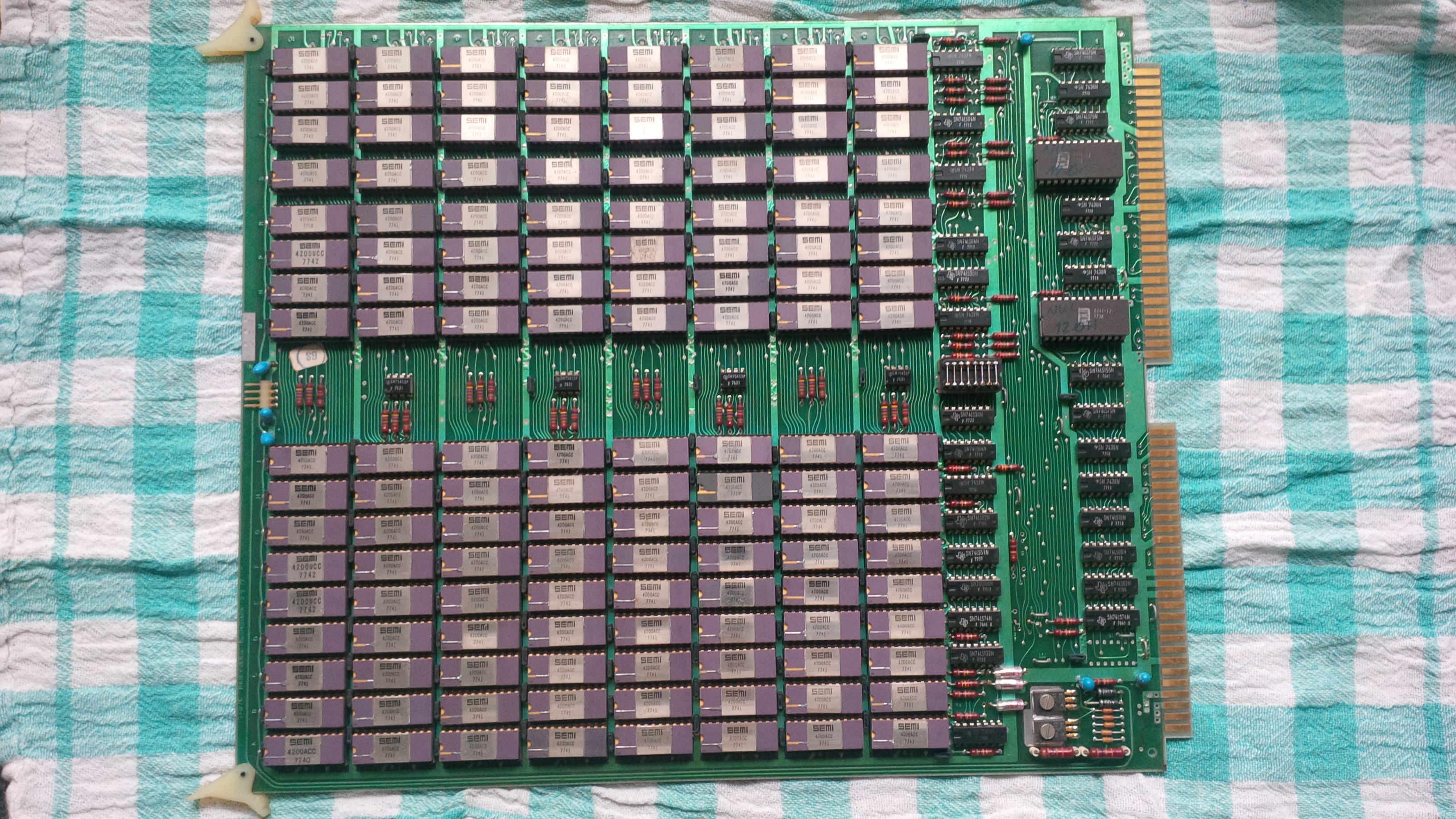
Speicherkarte
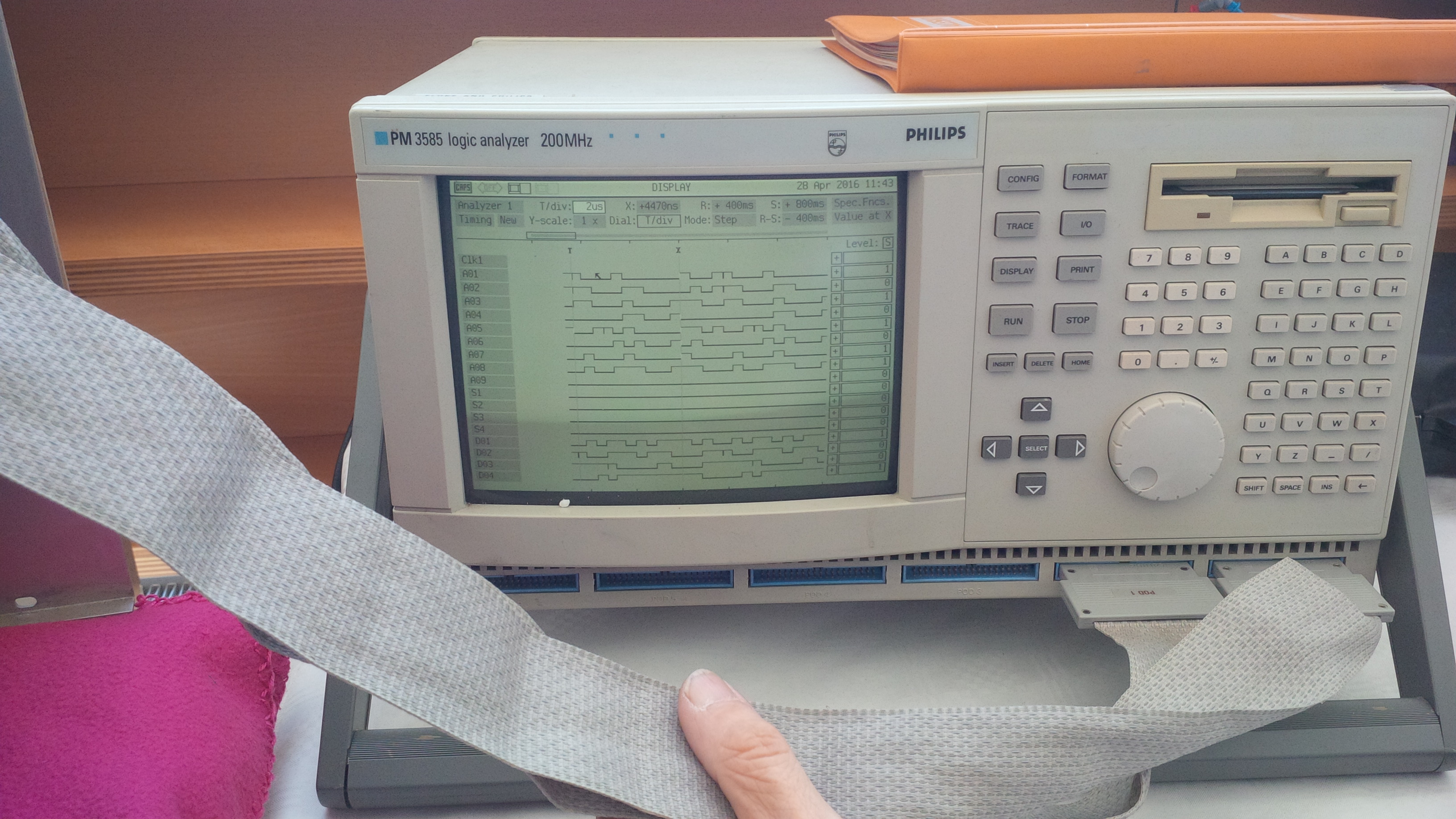
Test mit Logic-Analyzer
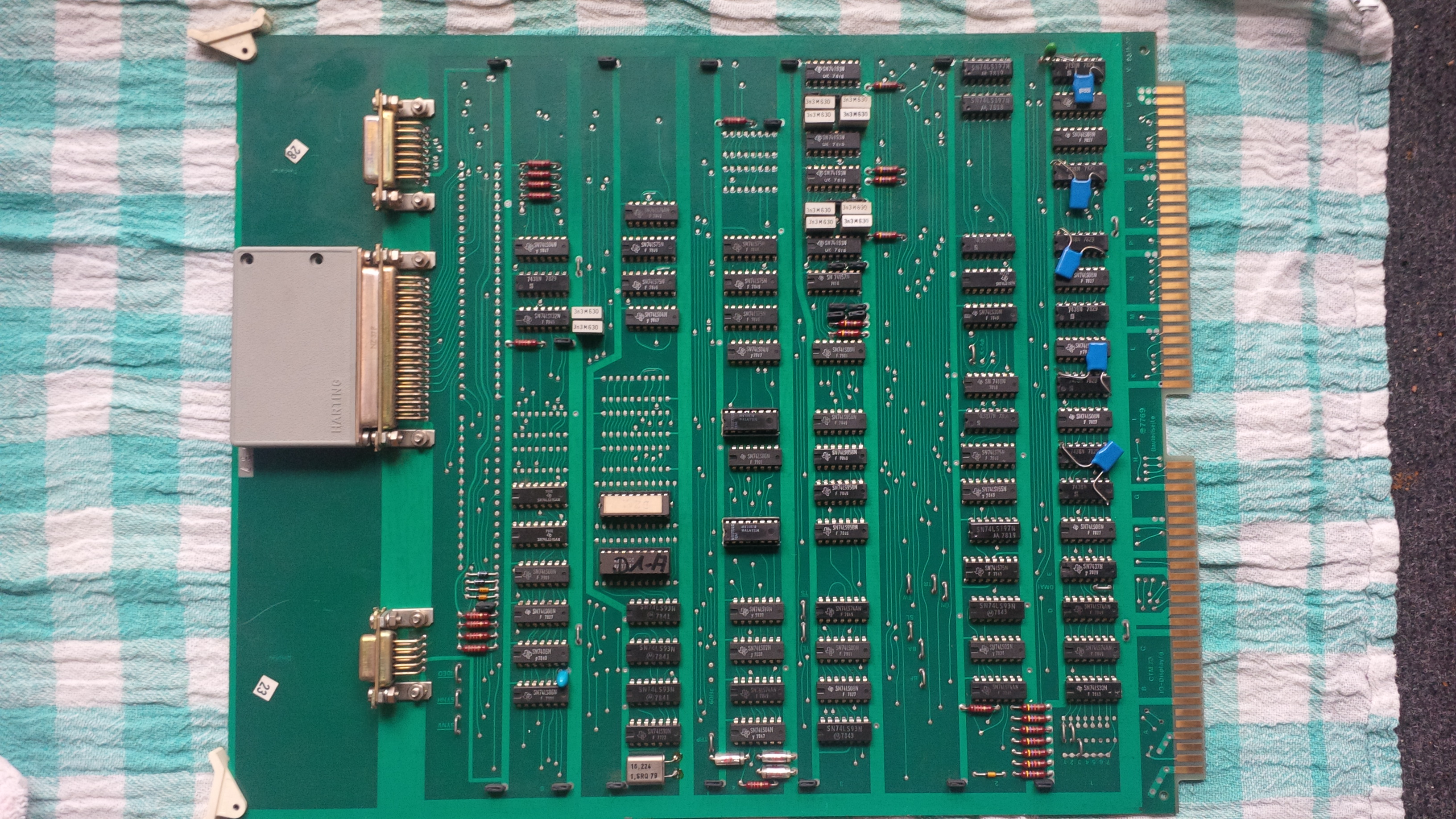
Wir tasten uns weiter vor, Richtung „Grafikkarte“ und stellen fest, dass das Schieberegister MK1007N (320 Bits (4×80) MOS Dynamic Shift Register, +5v and -12V) nicht ganz so korrekt seine Arbeit verrichtet. Aber immerhin kommen schon erste Zeichen auf dem Bildschirm, die im Sekundentakt blinken.
Das sieht schon mal sehr gut aus – vor allem, da die Bootmeldung im Handbuch mit *** beginnt, und hier die ersten drei Zeichen auch identisch sind. Das letzte Wort im Handbuch heißt „Corr“ – also auch hier zwei Treffer. Das sieht schon mal verdammt gut aus 🙂
verschobener Zeichensatz
Die zwei Schieberegister werden auf Präzisions-Sockel gesetzt und ein abgebrochenes PIN auf einen weiteren Sockel gelötet. Und siehe da, die CTM 70 meldet sich nach 25 Jahren Schlaf mit ihrer Bootmeldung und wäre nun bereit, von Platte zu starten.
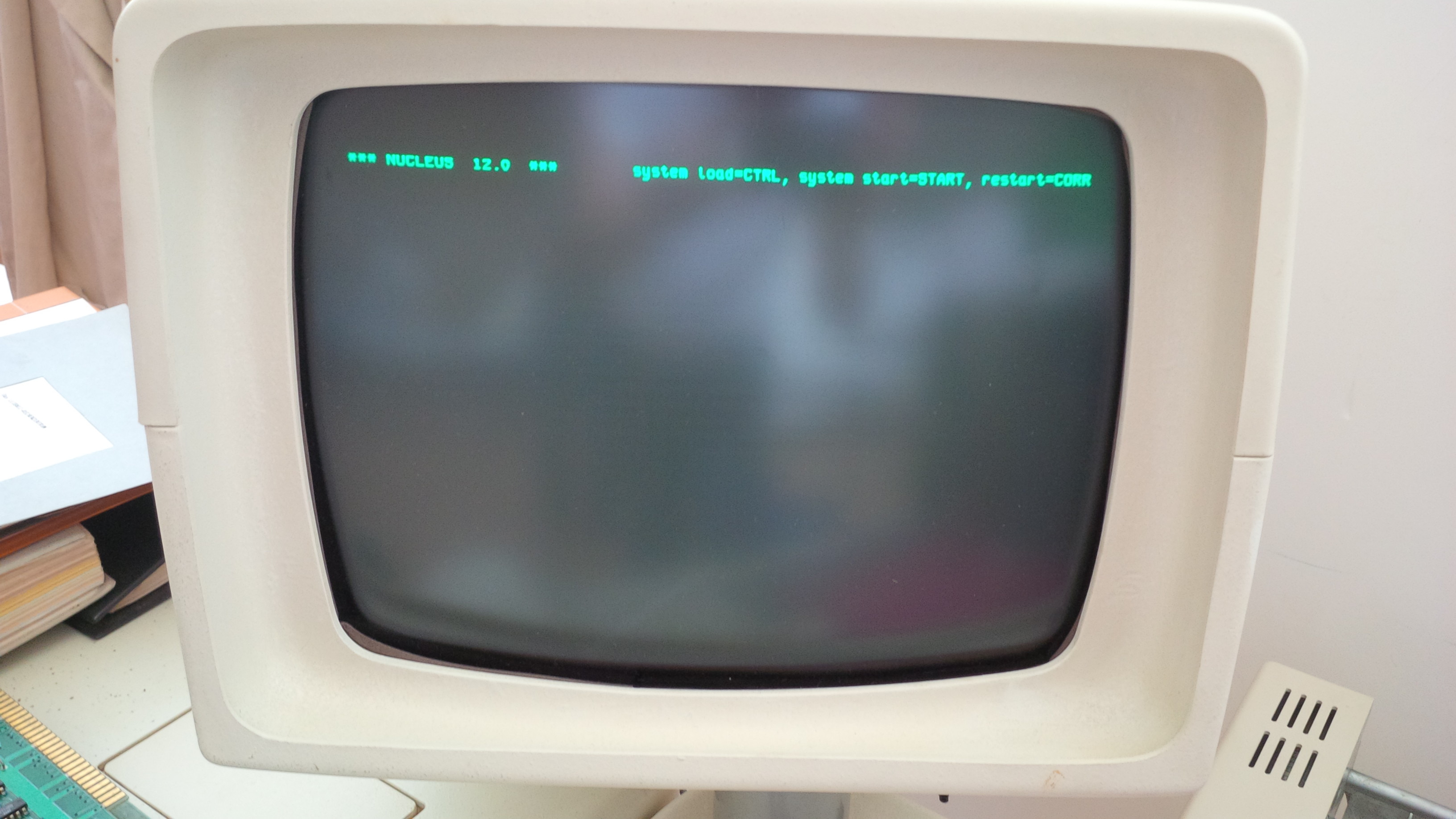
es lebt 🙂
Leider hatte ich beim VCFe das Plattenlaufwerk nicht dabei, denn mir war die Schlepperei von 100 Kilogramm für 5 Megabyte einfach zu viel. Und außerdem hatte ich im Auto sowieso keinen Platz mehr.
So, jetzt ist also das Plattenlaufwerk dran…